
We’re excited to share that SaraKIT has just been featured in a brand-new YouTube video:
“Top 15 Best-Funded Raspberry Pi & ESP32 Crowdsourcing Projects!” 🎉
In this ranking of the most successful crowdfunding campaigns, SaraKIT proudly secured 2nd place – showing the strong support and recognition our project has received from the global community of makers, developers, and innovators.
You can watch the full video here: Top 15 Best-Funded Raspberry Pi & ESP32 Projects
A huge thank you to everyone who believed in SaraKIT and continues to support its growth. 🚀
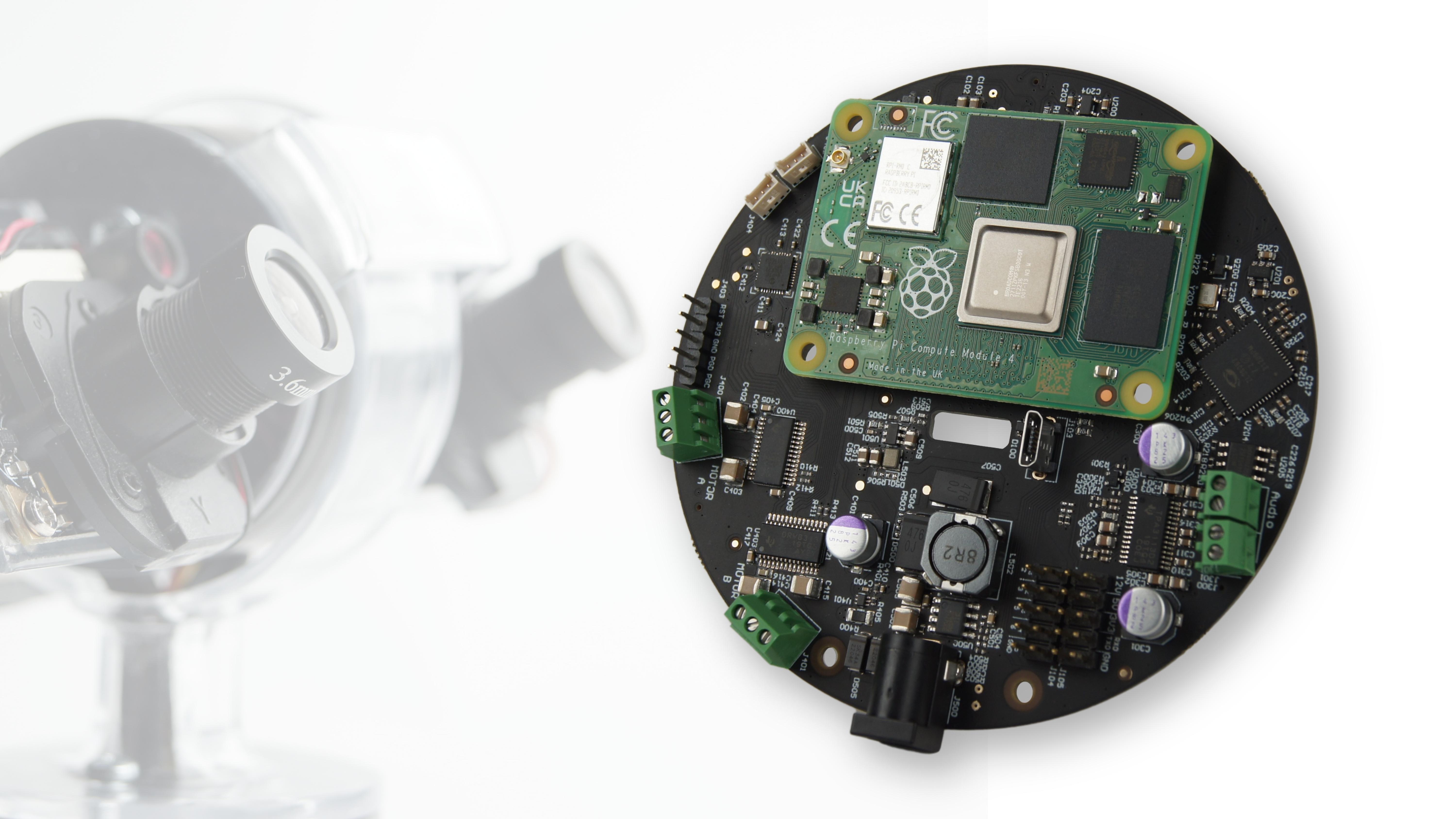
Using our SaraKIT electronics, we can build a device with ChatGPT support in a housing printed on a 3D printer with the function of tracking and recognition the user's face:


the operation of the device is shown in this video:
Of course, for simple integration with ChatGPT, the PCB itself is enough, without cameras, motors or a special housing, but this deprives our assistant of the sense of sight.


Watch in awe as we showcase our latest creation - a remote-controlled car controlled by a smartphone! Using the versatile SaraKIT platform combined with LEGO bricks, we've brought this innovative project to life. With just a few taps on your smartphone, you can maneuver the car with precision and explore the world of remote control like never before.

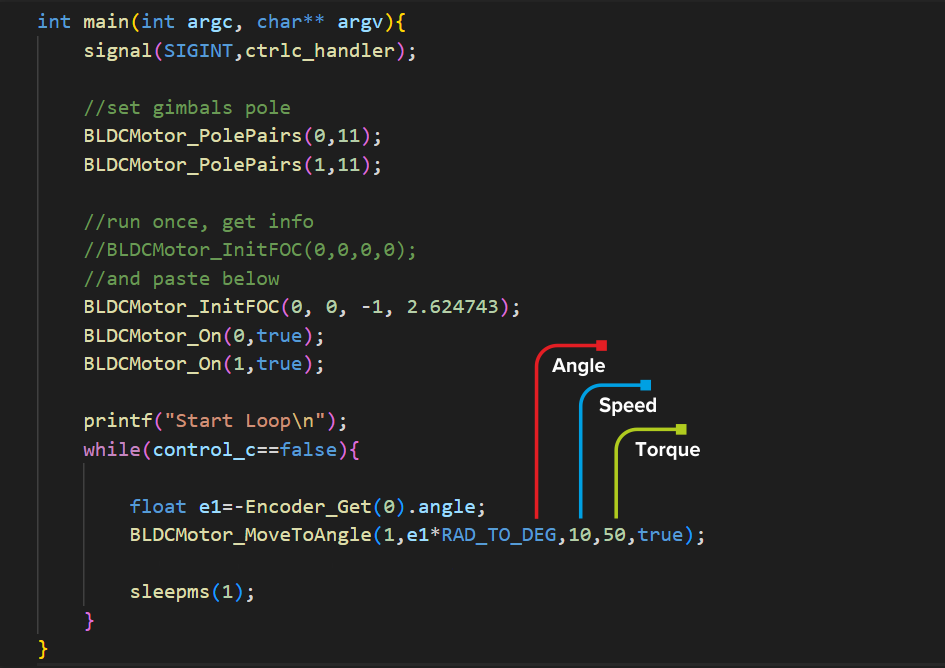
or knowing the diameter of the wheel, we can move the vehicle by a certain number of centimeters or meters (c++,python):
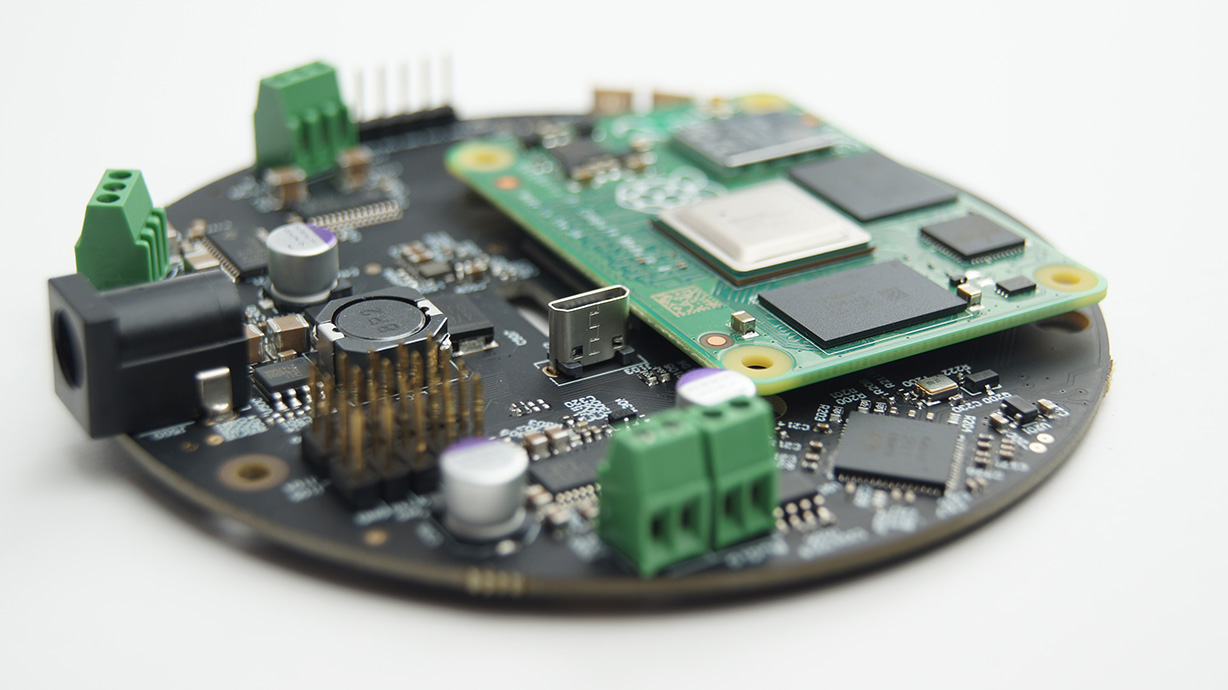
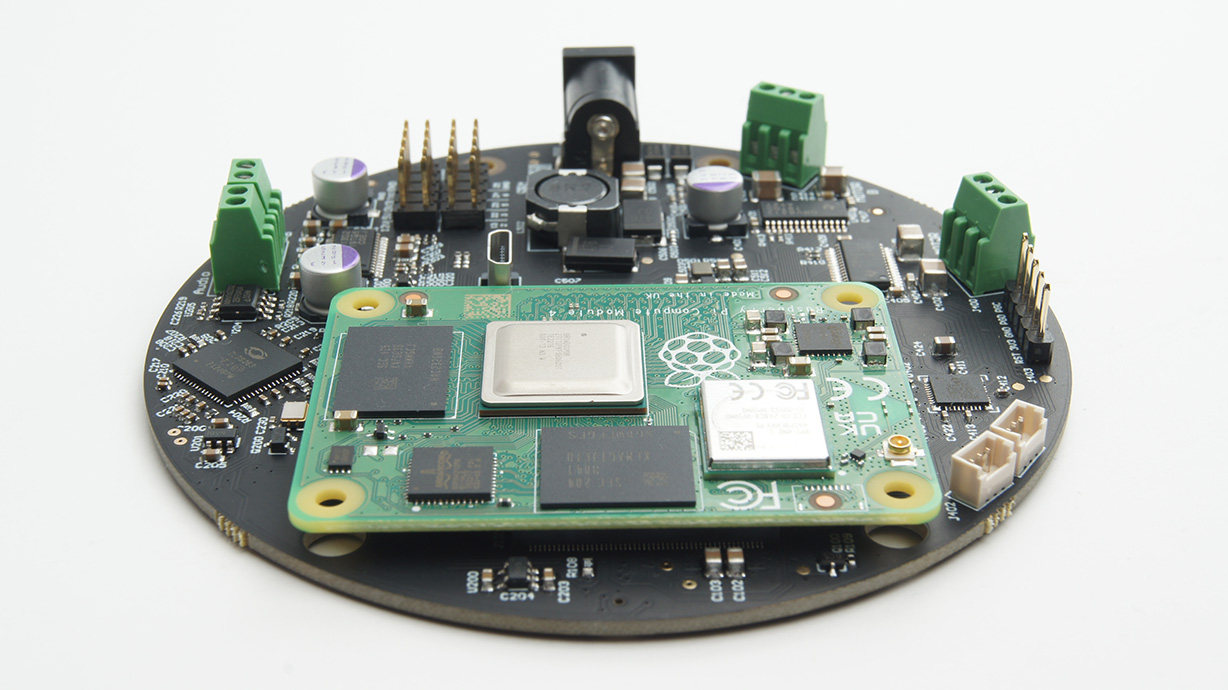
This movie showcases one of the applications of SaraKIT, an extension kit for Raspberry Pi 4 in CM4 version.
The SaraKIT kit includes most of the necessary elements: